SLAM surveying of hidden medieval water cisterns
Discover the 3D survey of the underground cisterns at Malaspina Castle in Massa. An applied geomatics case study combining traditional speleological mapping with mobile SLAM LiDAR technology.
5/4/20262 min read
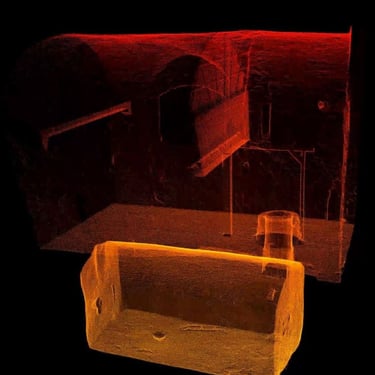
Five underground cisterns. Hidden beneath a Renaissance courtyard, one submerged, another sealed by a massive stone slab. All nestled inside a medieval castle with nearly a thousand years of history, having served as a fortress, barracks, and prison.
Local speleological groups initiated this mapping project, and I joined them for the final phase to deploy SLAM technology and document the workflow. Here is how combining traditional speleological surveying with modern mobile LiDAR delivers results that neither could achieve alone.
Project Background & The Site
The project was conceptualized by Nadia Ricci (President of the Tuscany Speleological Federation) in 2023 but was delayed until 2025 due to ongoing castle restorations.
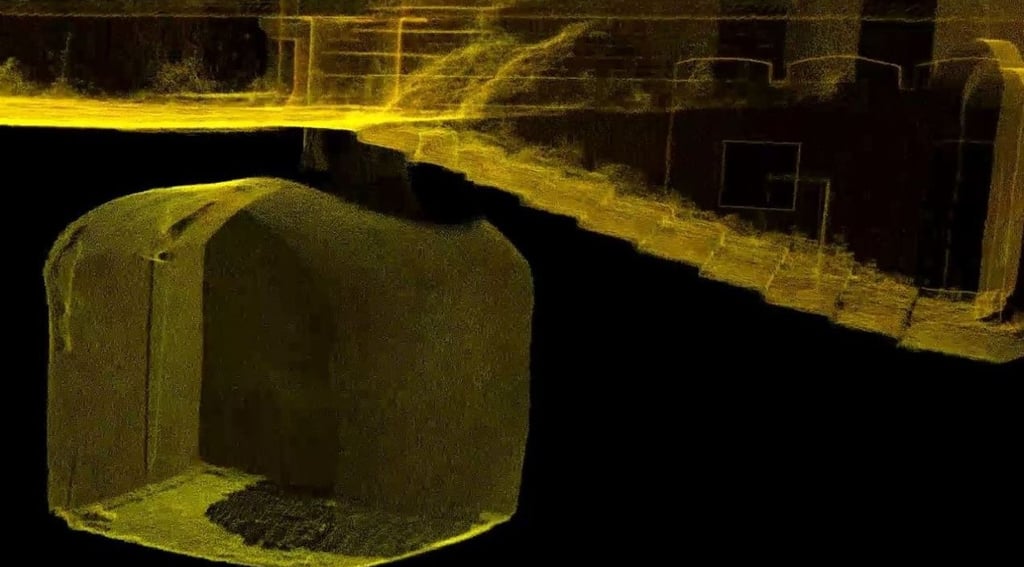
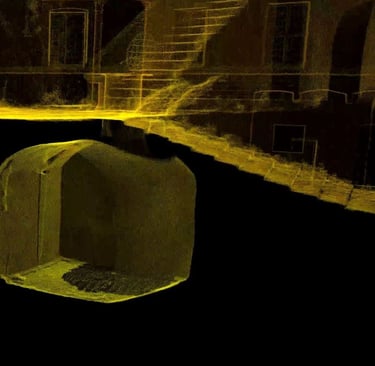
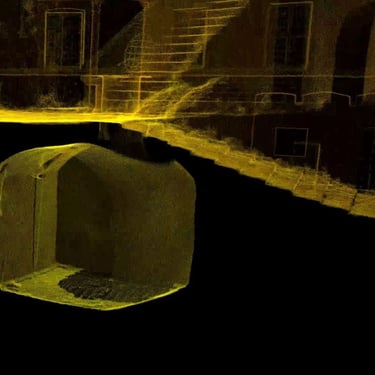
The site consists of five structurally distinct underground cisterns at Malaspina Castle in Massa, Italy. Architecturally simple—brick masonry, barrel vaults, and hydraulic mortar—these dark, confined spaces presented unique logistical and technical challenges.
Phase 1: Traditional Speleological Surveying
Before my arrival, the Gruppo Speleologico Archeologico Apuano and Speleo Subacquea Toscana established the geometric baseline over four field sessions.
The Methodology
The Tool: A modified laser distometer designed for cave surveying, recording a data triplet for each point: distance, inclination, and azimuth.
The Workflow: Moving from one control point to another, they built a survey traverse (poligonale) designed to close in a loop for error verification.
Data Capture: Data was sent via Bluetooth to the Toproid app on a smartphone for real-time sketching. In the office, this was processed into 3D volumes and CAD deliverables (floor plans, sections, and volume calculations).
The Flooded Cistern
Because lasers fail over water, a cave-diving team mapped the submerged cistern using traditional methods: a survey tape, underwater compass, and depth gauge to calculate elevation changes. It was slow and labor-intensive, but the only viable option.
Phase 2: Mobile SLAM LiDAR Capture
I joined the project to test the boundaries of SLAM in dark, confined, and geometrically irregular spaces. Using an Emesent Hovermap ST scanner, which relies on environmental geometry rather than GPS or light, it was the perfect testing ground.
I utilized two distinct payload deployment methods based on accessibility:
Method 1: The Drop-Down Approach (No Entry)
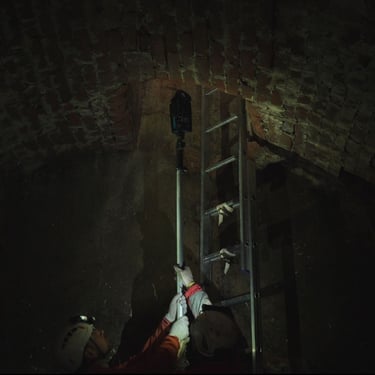
For the first cistern, I inverted the scanner, secured it to a telescopic pole, and lowered it through the narrow wellhead. No operator entered the space.
Pros: Complete elimination of confined-space safety hazards for the operator.
Cons: The scanner only captures what is visible from the drop point, creating shadow zones behind obstructions.
Crucial Detail: Passing through the narrow opening required extremely slow movement. SLAM algorithms need feature continuity; moving too fast through featureless bottlenecks causes tracking loss.
Method 2: Direct Entry Mapping
For the second cistern, I descended via ladder. The scanner was passed down via a pole and then handheld to walk the site.
Pros: Far superior data completeness. By moving the scanner dynamically, I eliminated almost all data gaps and shadow zones.
Georeferencing and Colorization
To make the 3D data actionable, I surveyed external targets using a GNSS receiver mounted on a 4-meter pole, achieving an accuracy of 5–6 cm. For visual context, a 360° camera was used to colorize the exterior point clouds (courtyard and facades) in post-processing.
Key Takeaways for Geomatics Professionals
The ultimate lesson of this project is methodological: there is no single tool for every job.
SLAM quickly captures complex 3D geometry but cannot penetrate water.
Speleological distometers build reliable traverses but suffer from electronic interference.
Traditional dive surveying is tedious but essential for submerged environments.
True efficiency lies in sensor fusion—understanding individual tool limitations and blending diverse datasets into a cohesive, high-definition model.









Watch the Workflow
I documented the entire SLAM workflow, including field challenges and data processing, on my italian YouTube channel (but English subs are available)
